Scope of services: Design, development, manufacturing, turnkey delivery and commissioning
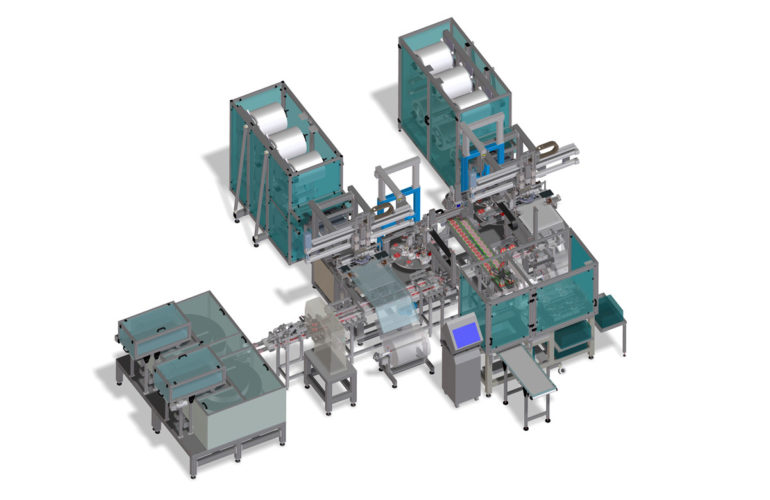
The system concept consists of a hybrid assembly line combining hard and flexible automation for the fully automated production of disposable kidney dialysis sets. It consists of individual feeding and specially developed dual-robot assembly cells for tube assembly using the Knoll Handling Head gripper system.
The separation and loading units, the assembly cells and the product inspection are connected via an indexing belt on which the goods carriers are fed in and out for assembly and inspection processes.
The dual-robot assembly cells are designed to be completely redundant.
All modules can be operated individually and can also be configured with different degrees of automation for further applications.
LxBxH: 28,5 X 9,5 X 2,35 (m)
The following modules were successfully implemented in the system
A comprehensive inspection includes specific visual inspections to verify the complete and correct assembly of all tubing as well as a leak test of the complete dialysis set.
In the unloading area, powered and free belts ensure the transport of the specially designed product carriers.
The complete separation and loading units as well as the dual-robot assembly cells are connected via a specially developed indexing belt. The product carriers are precisely positioned in these stations to ensure maximum assembly quality and production reliability.
The dual-robot assembly cells are designed for three-shift operation and can be easily removed from the production line for maintenance work. These assembly steps are then carried out additionally by other robot assembly cells.
The dual-robot assembly cells are equipped with a specially developed servo assembly head.